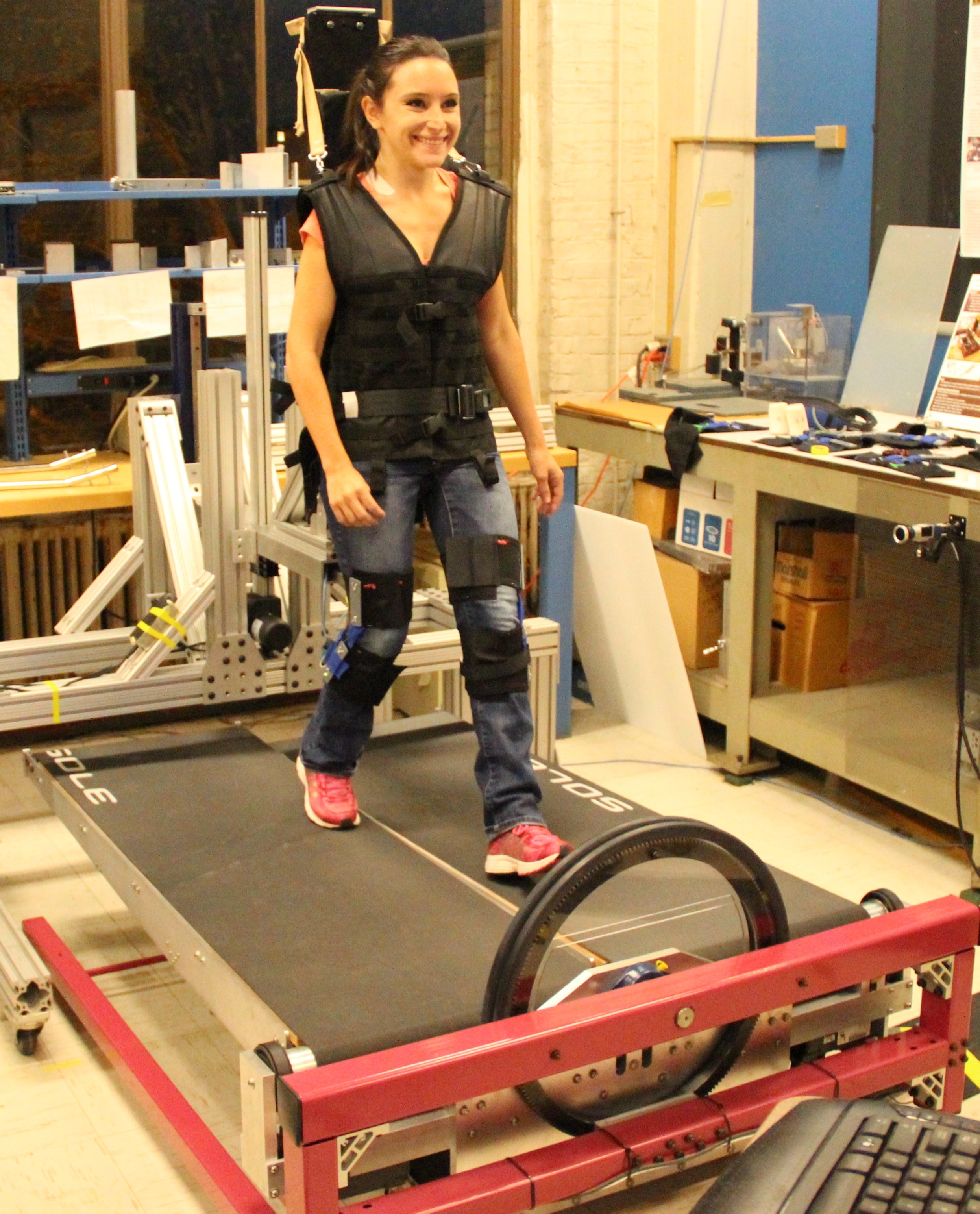
Thrust 1: Neurorehabilitation or assistive devices for populations who have suffered neurological injury that impairs movement such as stroke or cerebral palsy. These diseases affect the central nervous system due to a static injury…but there is a fantastic mechanism built into all of us called neural plasticity which allows our brains to reconfigure themselves to circumvent the damaged piece of the brain and recover lost movement. Rehabilitation is the only known method of recovery for static brain injuries and as mechanical engineers, we can develop devices to aid in rehabilitation and change lives. Assistive devices differ from rehabilitative devices by offering assistance without the goal of restoring the original self-directed movement that was lost…equally cool, equally life changing.
Coming soon will be Lab D4H (Design for Humans), a space reserved for undergraduates and master-level students to develop machines and products that enhance the human experience with the goal of fostering students’ passion to create meaningful projects while introducing students to research and independent product development. Foreseeable projects include three main thrusts:
Thrust 2: Augmentation of healthy human function and life. Think Iron Man…what can make a kid jump higher and run faster than the PF flyers? Can we design something that makes an ordinary guy like me bench press more than Arnold Schwarzenegger? Swim faster than Michael Phelps? Eat faster than Takeru Kobayashi? This type of research generally interests our military by helping to keep our troops safe by augmenting the human body.

Thrust 3: Actuators for Human-Machine Interaction. Industrial robots use powerful actuators with a gear-box on the output shaft to multiply torque. This is great for high torque applications but the high torques are dangerous for use near people. When interacting with a human, a machine must be compliant (or have low impedance) such that the robot feels soft to the touch while being able to generate appropriate forces. Roboticists circumvent the problems that originate with the motor-gearbox design by putting a spring in series with the actuator which is called a series-elastic actuator. Human muscles, on the other hand generate not only force but a stiffness. Synthetically replicating this type of behavior could change the world by giving you more biomimicking buddies!